JSR's robothåndteringsprosessautomatisering med YASKAWA håndteringsrobot brukes i håndtering og utpakking av plastpartikkelposer, det er ennøyaktig, pålitelig og bærekraftig håndtering, som bidrar med verdi for å fremme produksjonsautomatisering.
Uansett når det gjelder maskineri, landbruk, klær, konstruksjon eller dagligliv, kan vi se figuren av resirkulerte plastpartikler. Etter pakking må disse partiklene håndteres manuelt, som er et periodisk arbeid med høye kostnader og høy arbeidsintensitet. Kundens tidligere arbeidstid var 8 timer, og hver pose med materialer var 25 kg. Den manuelle effektiviteten er 2 poser per minutt, og 960 poser kan demonteres på en dag. Arbeidstiden etter robothåndtering og demontering er 24 timer, som kan betjenes kontinuerlig, og effektiviteten er 3 poser i minuttet, og 4320 poser kan demonteres på en dag.
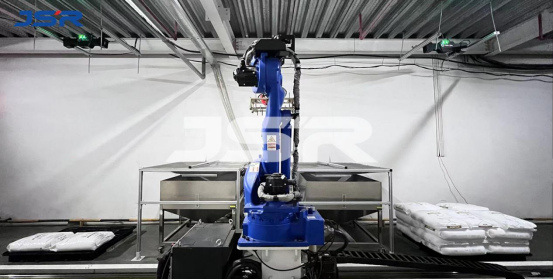
Løsningene implementert av Jieshno for kunder: Yaskawa håndteringsrobot GP180, 7,5 m lang bakkeskinne, materialbeholder, materialstativ, GP180 maksimal belastning 180 kg, maksimal armspenn 2702 mm. Effektiv vandring på 7,5 m jordbane er 6 m, bevegelseshastighet er 0,7 m/s. 3D-visuell identifikasjonsblankingsystem. 3D visuell identifikasjon blanking system, kamera med læringsfunksjon, gjennom tidlig materialdatainnsamling og senere materialmodellering, slik at suksessraten for kameragjenkjenning er 99,9%.
Automatisk produksjon forbedrer arbeidseffektiviteten betydelig, stabil produksjonskapasitet, nøyaktig levering, høy sikkerhet, rimelig bruk av det eksisterende området, forbedrer bedriftens image og renslighet av verksted, for å oppnå ubemannet produksjon.
Innleggstid: 26. september 2022
